Velodyne Lidar and OxTS INS for point cloud generation
Visimind distributes both Velodyne Lidar and OxTS INS technology. Together these two technologies form a complete system for point cloud generation from a variation of vehicles. A LiDAR sensor can sense range to a target, but it has no internal knowledge of when or where it is, or where it has moved to since the last scan occurred. This is where the INS adds essential information.

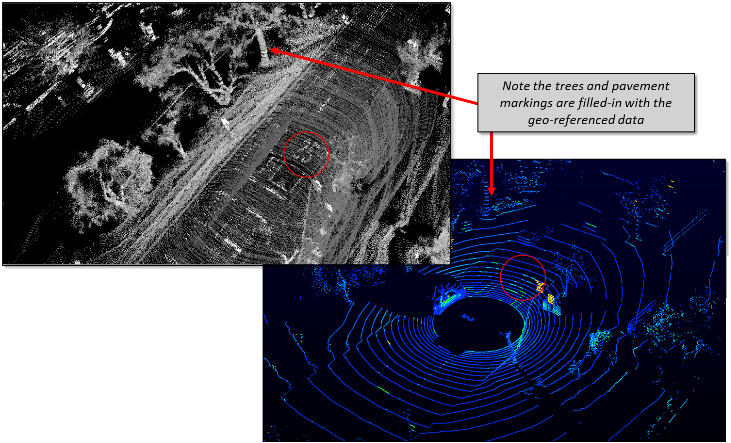
The Velodyne Lidar outputs a 3D point cloud in the laser coordinate system for every 360-degree rotation. These are coordinates without any connection to a map or a global frame. To generate a point cloud, you need to merge the frames and assign global map coordinates to each laser measurement. Also, the inertial data will support the processing to find the correct position where there are GNSS shadows. Direct georeferencing will always give the position and orientation of the IMU (Inertial Measurement Unit) so additionally a complete system must be able to find the difference in location and orientation between the IMU and the Lidar. This is the so-called boresight calibration.
Inertial Navigation Units
OxTS xNAV650

Survey+ v3

xOEM v3

Software
OxTS offer a range of software for a complete point cloud generation system.
NAVsuite
NAVsuite is OxTS' complimentary software toolbox. The application available within NAVsuite give surveyors the ability to configure, monitor, post-process and analyse the data from their OxTS INS.

OxTS Georeferencer and Boresight Tool
OxTS Georeferencer is a software tool developed by OxTS to combine INS navigtion data with raw LiDAR data. Together with the boresighting calibration tool you can create a high accuracy point cloud.